昨天我們討論了 RS 編碼,今天來討論他的錯誤更正機制。
回憶一下 Hamming Code ,他可以更正一個錯誤,並且有個快速漂亮的演算法來修正該錯誤。所以今天我們也要討論兩個問題:
訊息為

會先做出「訊息多項式」

再代點進去形成編碼

如果傳遞過程沒有錯誤,接收者可以直接用插值法計算回「訊息多項式」,把係數讀出來即可得到訊息。
現在假設傳遞過程中出現 e 個錯誤,我們等等會討論 e 必須在哪個範圍以內才能做更正。
意思是說,接收者收到的是

其中有 e 個 y_i 是錯的,其他都滿足

我們考慮一個多項式 E(x)

舉例,如果在 i = 1, 2, 4 時編碼傳遞出現錯誤,則

這個多項式叫做錯誤位置多項式。錯誤位置多項式的特性是,它在每個錯誤位置 alpha_i 都為 0,意思是說,通過計算 E(x),我們能夠定位出訊息中出現錯誤的位置,這在後續的錯誤更正過程中至關重要
如果我們的編碼有 e 個錯誤,則

會是 e 次,且領導係數等於1。
我們將使用這個錯誤位置多項式,來推導解決 RS 編碼中錯誤位置與內容的關鍵等式。
因為傳遞過程有錯誤,所以在錯誤的地方

但是如果你在兩旁都乘以 E(x) ,那麼

因為 E 多項式把錯誤的插值點都「零掉了」。
現在我們把右手邊寫成

則這個關鍵等式變成

因為

所以如果我們可以求到 N(x) 以及 E(x) ,則

如果我們的編碼有 e 個錯誤,則

會是 e 次,且領導係數等於1。
你以為你這樣可以算 E 嗎?並沒有!因為我們不知道 y_i 在哪個 i 出錯,所以不能直接算。
我們必須假設

共有 e 個未知數。
另外因為

於是

假設

共有 k+e 個未知數。
從關鍵等式

我們有 n 個條件可以用:
好!我們共有 e + (k+e) = k + 2e 個未知數,然後有 n 個條件,解出唯一解的條件就是:

移向得到

這告訴我們,當 e 小於 (n-k)/2 時,RS 編碼才能進行更正。否則 e 大於 (n-k)/2 時,我們的未知數是比條件還要多,解不回唯一的 E(x) 與 N(x) ,也就解不回訊息多項式
我們來細看解關鍵等式的步驟,這是 RS 編碼錯誤更正的核心。
首先該等式為

其中

因此可以寫出:

將未知數寫在左邊,常數項寫在右邊:

因此可以寫成矩陣方程
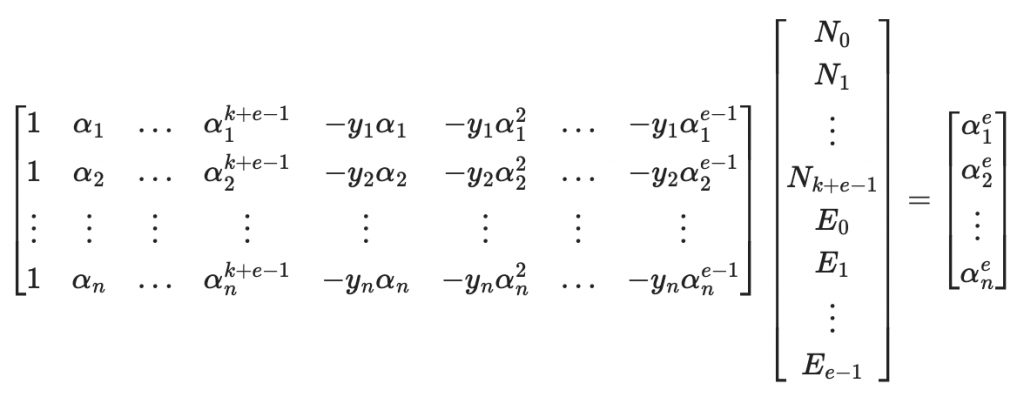
然後進行高斯消去法即可解得 N(x) 與 E(x) ,相除即可得到訊息多項式!
延續上次使用的參數以及訊息:
q = 17
n = 7
k = 3
我們使用以下的 Channel function 來模擬雜訊,其中 num_of_error 是最大錯誤數量,因為我們這裡是

所以我們用 num_of_error = 2
def ChannelNoise(encoded, num_of_error):
result = encoded.copy()
actual_num_of_error = randint(0, num_of_error)
for i in range(actual_num_of_error):
error_position = randint(0, n-1)
error = R.random_element()
result[error_position] += error
return result
received = ChannelNoise(encoded,2)
print(f"原始碼字: {encoded}")
print(f"接收到的: {received}")
# Outputs:
# 原始碼字: [10, 4, 8, 6, 16, 12, 10]
# 接收到的: [10, 4, 8, 6, 16, 2, 14]
解關鍵等式
# 解關鍵等式
# 我們需要找到一個 e 次多項式 E(X),這個多項式用來定位錯誤位置,並找到一個 e+k-1 次的多項式 N(x),
# 它包含了訊息與錯誤更正的組合。
# 接收的資料應滿足以下條件:received[i] E(alpha[i]) = N(alpha[i]),這樣我們可以利用這些條件來解出 E(x) 和 N(x)。
e = (n - k + 1)//2 #e = 2
LinearSystem = []
for i in range(n):
LinearSystem.append(
[alphas[i]^j for j in range(e+k)] + [-received[i] * alphas[i]^j for j in range(e)]
)
print(matrix(LinearSystem))
constant_term = []
for i in range(n):
constant_term.append( [received[i] * alphas[i]^e])
print()
print(matrix(constant_term))
print()
solution = matrix(LinearSystem).solve_right(matrix(constant_term))
print(solution.list())
# Outputs:
# [ 1 13 16 4 1 15 8]
# [ 1 16 1 16 1 13 4]
# [ 1 7 15 3 4 9 12]
# [ 1 14 9 7 13 11 1]
# [ 1 2 4 8 16 1 2]
# [ 1 9 13 15 16 5 11]
# [ 1 1 1 1 1 7 7]
# [15]
# [ 4]
# [ 1]
# [ 3]
# [13]
# [ 3]
# [10]
# [6, 3, 7, 3, 1, 1, 0]
關鍵等式的結果:
N = solution.list()[:e+k]
E = solution.list()[e+k:]
print(N,E)
# Outputs:
# [6, 3, 7, 3, 1] [1, 0]
計算回訊息多項式:
R_poly = PolynomialRing(R, 'X')
print(R_poly(N)/R_poly(E+[1]))
print(R_poly(message))
print(R_poly(N)/R_poly(E+[1]) == R_poly(message))
# Outputs:
# X^2 + 3*X + 6
# X^2 + 3*X + 6
# True
RS 編碼能更正最多 (n−k)/2 個錯誤,當超過此範圍時,無法唯一解出錯誤位置多項式和訊息多項式。
錯誤位置多項式 E(x) 是用來定位錯誤符號位置的關鍵。它在所有錯誤位置上取值為 0,幫助濾除錯誤數據。
關鍵等式將錯誤訊號和正確訊息聯繫起來,並提供足夠的條件來解出 E(x) 和 N(x)。
使用矩陣方程將關鍵等式中的未知數表達出來,通過高斯消去法可以解得 N(x) 和 E(x),最終恢復訊息多項式。
使用 SageMath 程式模擬 RS 編碼的錯誤更正機制,透過編碼、通道噪聲及解碼步驟展示了實際應用。
RS 編碼與 Hamming Code 相比,能夠更正更多的錯誤,這使它成為數位通訊和數據存儲中極為重要的錯誤更正碼。特別是在高噪聲環境中,RS 編碼的錯誤更正能力顯得尤為強大,並被廣泛應用於光碟、衛星通訊等領域。
ref:
GURUSWAMI, Venkatesan; RUDRA, Atri; SUDAN, Madhu. Essential coding theory.

